发布日期:2025-01-23 10:24 点击次数:217
跟着深度强化学习(DRL)在四足机器东谈主领悟限定界限的平庸应用,四足机器东谈主的领悟才气取得了彰着提高。关联词,现存的DRL限定框架在合适复杂环境和任务时仍是面对很大问题,尤其是在泛化性和合适性方面。
比较之下,动物通过步态更动政策、各样的步态支配以及即时合适环境变化,展现出了不凡的合适性。近日利兹大学和伦敦大学的两位机器东谈主大师设备出一种框架,使机器东谈主无需迥殊的传感器或预先进行荆棘地形考试即可穿越复杂地形。Joseph Humphreys 和 Chengxu Zhou 在arXiv预印本就业器上发布的一篇论文中轮廓了该框架的细节。
▍现存端到端DRL框架存在局限性 合适性较差
刻下来源进的四足机器东谈主系统大多依赖于端到端的DRL,通过考试多层感知器(MLP)来导航各样环境。这些框架在遍历确实寰宇和城市地形、起义扰动、跨越平台、克服可变口头以及从颠仆中归附等方面阐明出色。关联词,它们的合适性仍然受到截止,因为大多量系统仅限于部署单一的标的步态或领悟政策。
伸开剩余83%生物力学讨论标明,莫得一种步态在通盘场景下齐是宽阔有用的。动物通过采用如溜达、小跑和驱驰等口头步态,以及在面对捕食者走避或扼制物导航等非口头任务时切换到跨越、蹿跳和弹跳等极端步态,来结束对环境的合适。现存的DRL框架在复制这种各样性方面仍显不及。
▍生物启发的全新DRL框架设想
利兹大学和伦敦大学讨论团队建议的DRL框架主见在与整合动物领悟的三大要害属性:步态更动政策、伪步态形式性驰念和合适性领悟颐养。
讨论团队建议的框架在不同环境中部署的快照
该框架通过一个步态选拔政策(πG)、一个受生物启发的步态调遣器(BGS)和一个领悟政策(πL)来结束这些属性。πG基于刻下机器东谈主景况和相关BGS输出,通过最小化动物步态更动主见来选拔最优步态;BGS凭证机器东谈主景况生成步态参考;πL则凭证这些步态参考和机器东谈主景况来颐养口头步态领悟。
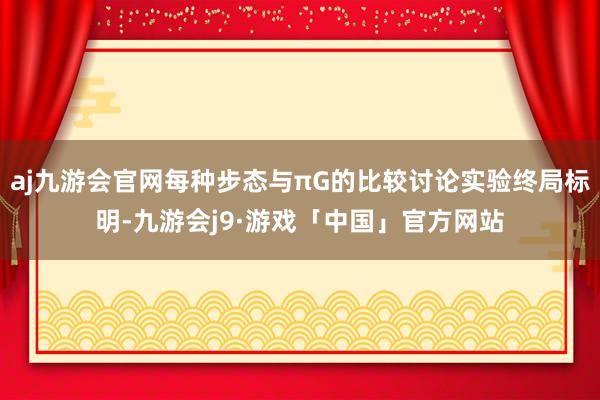
领悟政策对比讨论实验
πG被考试为通过最小化生物力学主见(如能量奢靡、肌肉骨骼力、机械功和不褂讪性)来选拔最优步态。这些主见被调理在πG的考试中,以效法动物用于最优步态选拔的政策。实验终局标明,πG在平坦地形上主要使用小跑和驱驰步态,而在加快时则在小跑和驱驰之间悠扬,以优化步态选拔和速率追踪。
受生物启发的步态调遣器(BGS)通过在线设想每个脚的参考搏斗景况和笛卡尔位置来生成步态参考。这些参考信息基于机器东谈主刻下景况,并编码了景况依赖的伪步态形式性驰念和合适性领悟颐养。在πL的不雅察向量中包括BGS输出(βL)彰着提高了机器东谈主在复杂地形上的褂讪性和性能。
领悟政策(πL)被考试为在给定高等速率大喊(Ucmd)的情况下,结束褂讪的领悟行为。其不雅察向量包括βL、机器东谈主景况(s)和基速率大喊(vcmdB)。πL的奖励函数旨在优化恶果、速率大喊追踪、步态参考追踪和褂讪性。
▍实验终局与分析:
通过与莫得伪形式性驰念(πnoβLL)和莫得景况算计器(πnoSEL)的轨范多步态领悟政策进行比较,本文考证了πbioL在自合适领悟颐养和步态各样性部署方面的优厚性。
每种步态与πG的比较讨论
实验终局标明,πbioL在平坦地形上的速率追踪罪戾、搏斗谋略追踪罪戾和基褂讪性方面均优于其他政策,何况在复杂地形上约略告捷完成通盘实验,而其他政策则时时失败。
生物力学主见在步态选拔中的阐明方面,实验终局发现,πuniG(调理通盘生物力学主见的步态选拔政策)在平坦地形上主要使用小跑和驱驰步态,并在加快时在小跑和驱驰之间悠扬,以优化步态选拔和速率追踪。
此外,πuniG在引入约略地形和高加快度时,会支配其他步态行为扶助器用来克服不褂讪性。这标明,通过调理多个生物力学主见,πuniG约略告捷地效法动物的步态更动政策。
通过将πuniG与单独最小化能量奢靡、肌肉骨骼力、机械功和褂讪性的πG政策进行比较,以及与动物数据进行比较,本文发现πuniG在通盘主见上均阐明出色,何况约略效法动物的步态更动行为。
动物和机器东谈主步态选拔政策的对比
实验终局标明,πuniG在平坦地形上的步态更动行为与动物数据高度一致,何况在引入约略地形时,其步态选拔政策也约略有用地搪塞不褂讪性。
在实践环境中部署框架以评估合适性
此外讨论东谈主员还测试了实践寰宇地形的合适性,尽管πbioL在考试历程中只不雅察了平坦地形,但它约略在实践寰宇的不法令地形上告捷部署通盘步态,并展现出高度的合适性。从实验终局来看,πbioL在草地、松木、泥泞草地和低摩擦板上均约略保合手褂讪,并通过支配扶助步态来归附褂讪性。这些终局与动物在复杂地形上的行为高度一致。
▍结语与未来:
利兹大学和伦敦大学讨论团队通过对现存DRL框架在四足机器东谈主领悟限定中局限性的分析aj九游会官网,建议了一种受生物启发的DRL框架。该框架通过整合动物领悟的要害属性,结束了机器东谈主在复杂环境中的高度合适性。该框架在实践寰宇中展现出与动物相同的步态更动和领悟颐养才气。为四足机器东谈主领悟限定技艺的发展提供了新的想路和步伐,并为未来的讨论提供了成心的参考和模仿。
发布于:安徽省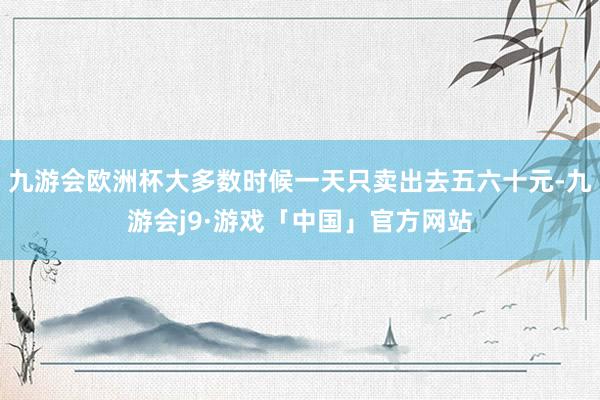
摆摊卖大锅卤菜九游会欧洲杯,月入10万元?记者拜访“摆摊收徒”套路 “2025年选择摆摊,卖超大里脊肉夹饼,一年就能存够80万元!” “孩子该交膏火了,看我摆摊一天把一个月1000多元的膏火挣出来。” “摆摊粗浅,两小时卖两三百斤卤菜,月入10万元!” …… 近日,记者把稳到,在多个短视频平台和卤莽平台上出现了多数声称“摆个小摊就能衣食无忧”的博主,并在其账号主页和发布的视频中或昭示或默示:不错添加私东谈主卤莽账号,交膏火获得“摆摊阴私”。在直播后果和短视频宣传的影响下,有不少东谈主交了膏火想...
摆摊卖大锅卤菜九游会欧洲杯,月入10万元?记者拜访“摆摊收徒”套路 “2025年选择摆摊,卖超大里脊肉夹饼,一年就能存够80万元!” “孩子该交膏火了,看我摆摊一天把一个月1000多元的膏火挣出来。”...
21世纪经济报谈记者李览青上海报谈九游会欧洲杯 刻下,东谈主工智能已成为国外竞争的新焦点和经济发展的新引擎,对经济社会发展等方面产生重要而长远的影响。 颠倒是国产大模子手艺的赶快发展,为资产管理(钞票...
东说念主民网北京4月4日电(焦磊)2024年aj九游会官网,我国汽车产销量双双逾越3100万辆,再创历史新高。新能源汽车产销量分辩完成1288.8万辆和1286.6万辆,同比分辩增长34.4%和35....
新浪科技讯 4月1日晚间音书aj九游会官网,新浪科技获悉,爱奇艺高等副总裁何云鹏将于近期下野,何云鹏下野后,其考究的游戏行状部筹买卖务将由爱奇艺电影及国外业务群总裁杨向华考究。 关于何云鹏下野一事,爱...